基于PLC的三层电梯教学装置的研发
可编程序逻辑控制器PLC(ProgrammableLogicController)是一种以微型处理器为核心,融计算机技术、自动化技术和通信技术为一体的新型工业控制装置。它具有体积小、重量轻、功耗低,编程简单、易维护,通用性好,抗干扰能力强、可靠性高等优点。目前,PLC已在国内外被广泛应用于电力、石油、化工、钢铁、机械制造等领域的自动控制中,包括开关量逻辑控制、模拟量控制、运动控制、过程控制、数据处理、通信和联网等[1-2]。由于PLC在工业控制领域中占据着重大的地位,现绝大多数高校都开设了这方面的课程,而课程的实践环节至关重要。本文介绍了一种三层电梯教学装置,此装置是基于PLC研制的,可以辅助一些教学机构完成机电一体化系统分析、机电传动、PLC控制等多方面的教学,同时为学生提供了良好的实验学习环境,不但可以让学生模拟电梯的多种机械结构,还可以让学生练习PLC控制系统的硬件选型、电路设计、软件开发编程、人机界面设计和通讯等方面的技能。
1 三层电梯教学装置总体设计
三层电梯教学装置的总体设计包括机械系统的设计和电气控制系统的设计两部分。其中,机械系统的设计主要包括开关门系统的设计和曳引系统的设计,电气控制系统的设计主要包括系统的基本结构分析、控制要求分析、PLC选型与I/O点数分配、变频器的选择与参数设置、PLC程序设计与触摸屏人机界面的设计。
该三层电梯教学装置的整体结构如图1所示,包括左侧的电梯结构模型和右侧的系统控制台两部分。装置框架采用工业铝型材搭建以便于拆装,门机构采用直流电机控制,曳引系统采用三相交流电机变频调速控制,可实现的主要功能有轿厢内外信号的登记与消号、定向选层、轿厢位置判断、顺向截梯、换速、平层和开关门等。
2 机械系统设计
2.1开关门系统设计
开关门系统采用连杆机构传动方案,此方案使用12V直流电机进行控制,电机轴与电机摇臂采用顶丝挤压电机轴键的方式进行连接,电机摇臂正反转180°分别实现电梯门的开和关。考虑到等边三角形具有结构简单、稳定性好且计算方便的优点,并通过对机构的工作原理、预设工作条件及几何计算进行分析,最终确定连杆机构各部分零件的尺寸为:电机摇臂两端轴心中心距为40mm,连杆两端轴心中心距为200mm,摇杆两端轴心中心距为200mm,滑块移动范围为40mm。最终达到的运动效果为:电机轴或电机摇臂围绕旋转中心正反转180°,相应摇杆摆角为60°,滑块上下移动的距离为40mm,且门完全打开时门的间距为400mm,即两扇门的宽度。其开关门状态如图2、图3所示。
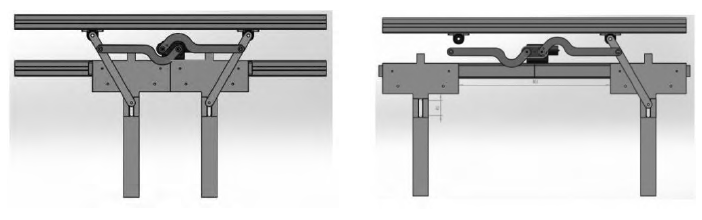
图2 关门状态图 图3 开门状态图
2.2曳引系统设计
曳引系统是电梯完成升降功能的动力装置,其组成器件主要有曳引电机、减速器、联轴器、曳引轴、导向滑轮、钢丝绳和配重等。其中,曳引电机起着至关重要的作用,下面主要介绍曳引电机的选取。
2.2.1曳引电机运行分析
①轿厢装载至125%额定载荷时应能保持平稳状态运行。
②无论轿厢内空载还是满载,必须保证在任何紧急制动时,其减速度值不能超过缓冲器作用时的减速度值。
③当对重压在缓冲器上而曳引电机按电梯上行方向旋转时,应不能提升空载轿厢。
④由于曳引电机是连续周期性工作的,所以应允许电机频繁的启动和制动。
⑤由于曳引电机的启动转矩较大,为保证轿厢运行速度几乎不受负载变化的影响,所以应使电机的堵转电流较小。
综上分析,选择三相交流异步电动机,该类电动机具有高效节能、振动小、噪声低、运行安全可靠的优点,适于频繁的启动、制动和换向。
2.2.2曳引电机参数计算
电梯轿厢从一楼到三楼用时t=10s,行程h=1m,电梯匀速运行时的速度为:v=2h÷t=2×1÷10=0.25m/s电机机械能转化为电能的效率η=85%,轿厢重m1=20kg,载荷重m2=30kg,电机有效功率为:P=(m1+m2)gv=(20+30)×10×0.2=100W
电机总功率为:P总=P÷η=100÷0.85=117.6W
考虑余量,故选用功率为120W的三相交流异步电动机,其额定转速为1440r/min。该电机轴径D=15mm,设计轴上缠绕钢丝绳部分的直径D1=20mm,此部分轴转速为:n=60v×103÷(πD1)=60×0.2×103÷(3.14×20)=191r/min减速器减速比为:i=1440÷191=7.5:1
转矩为:T=9550P总×103÷n=9550×117.6×103÷191=5.88×106N·m
3 电气控制系统设计
3.1控制系统基本结构分析
电梯PLC控制系统大体可分为拖动控制系统和信号控制系统,它的组成元器件主要有PLC、变频器、曳引电机和门电机等,其基本结构方框图如图4所示。
电梯拖动控制系统的拖动方式主要有交流拖动和直流拖动两种。随着PLC和变频器的快速发展,目前电梯使用PLC控制变频调速的交流拖动方式较多,因为它既可以形成半闭环控制系统,又可以形成全闭环控制系统,从而会大大提高电梯的运行效率和平层精度;电梯信号控制系统的核心是PLC,其外部输入信号通过输入接口传输到PLC内部,然后根据用户编制的程序进行计算,最后将计算结果通过输出接口传输到PLC外部,从而实现电梯各功能的控制。

图4 电梯PLC 控制系统基本结构方框图
3.2控制要求分析
3.2.1轿厢内呼分析
①当轿厢处于1层或2层时,按轿厢内3楼位置按钮,轿厢上升到3楼;
②当轿厢处于2层或3层时,按轿厢内1楼位置按钮,轿厢下降到1楼;
③当轿厢处于1层时,按轿厢内2楼位置按钮,轿厢上升到2楼;
④当轿厢处于3层时,按轿厢内2楼位置按钮,轿厢下降到2楼;
⑤当轿厢处于上升状态时,若按轿厢内小于其当前楼层位置按钮,轿厢则等待上升结束后再执行此按钮的动作;当轿厢处于下降状态时,若按轿厢内大于其当前楼层位置按钮,轿厢则等待下降结束后再执行此按钮的动作。
3.2.2轿厢外呼分析
①当轿厢处于1层或2层时,按3楼下行呼叫按钮,轿厢上升到3楼;
②当轿厢处于2层或3层时,按1楼上行呼叫按钮,轿厢下降到1楼;
③当轿厢处于1层时,按2楼下行或上行呼叫按钮,轿厢上升到2楼;
④当轿厢处于3层时,按2楼下行或上行呼叫按钮,轿厢下降到2楼;
⑤当轿厢处于上升状态时,若按下行呼叫按钮,轿厢则等待上升结束后再执行此按钮的动作;当轿厢处于下降状态时,若按上行呼叫按钮,轿厢则等待下降结束后再执行此按钮的动作。
3.3PLC选型与I/O点数分配
SIMATICS7-200系列PLC是西门子公司前些年投入市场的小型可编程序控制器,可单机运行,也可扩展输入、输出和功能模块,其价格低廉、运行速度快、可靠性高,并具有强大的多种集成功能和实时性,该电梯选用此系列PLC。
对该电梯所有信号进行分析,共有40个数字量输入信号、28个数字量输出信号和1个模拟量输出信号,其I/O点数分配如表1所示。由于点数多,所以该控制系统选择型号为SIMATICS7-200CPU226的PLC,并配有一个型号为EM223的数字量扩展模块以及一个型号为EM235的模拟量扩展模块。

表1说明:I3.6、I3.7、I4.0~I4.7均为检修模式的输入信号。
3.4变频器的选择与参数设置
设计此教学装置载重为30kg,三相异步电动机功率约为120W,选型号为FVR0.2E11S-2JE的变频器,主要参数设置如下:
①运行方法,外部输入,F02=1;
②最高输出频率设定,F03=50Hz;
③加速时间设定,F07=3s;
④减速时间设定,F08=2s;
⑤制动开始频率,F20=6Hz;
⑥制动时间,F22=3s[5-7]。
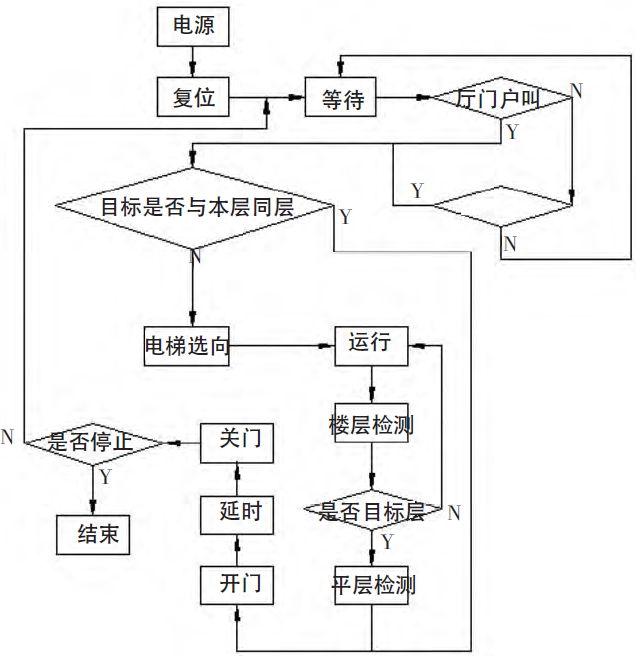
图5 电梯PLC 控制程序流程图
3.5PLC程序设计
电梯PLC控制系统由呼叫到响应形成一次工作循环[8],其控制程序流程图如图5所示。
下面对PLC程序设计的几个关键点作详细分析与说明。
①初始化复位:电梯上电后首先要进行初始化复位。若轿厢不停在一楼,则下降到一楼并停止;若轿厢门和各楼层门有处于非关闭状态的,则进行关闭。
②定向运行:当电梯存在呼叫信号时,若呼叫信号大于楼层位置信号,电梯则定向为上行,若呼叫信号小于楼层位置信号,电梯则定向为下行。
③延时启动:电梯定向完成后,设置延时1s。当延时时间到时,若定向为上行,则Q0.3、Q2.7、AQW0输出,驱动变频器带动三相交流曳引电机正转;若定向为下行,则Q0.3、Q2.6、AQW0输出,驱动变频器带动三相交流曳引电机反转。
④楼层位置判断:当电梯上行到达各层上行平层区时,相应辅助继电器为ON,记录上行到达的位置;当电梯下行到达各层下行平层区时,相应辅助继电器为ON,记录下行到达的位置。
⑤平层减速及停车:当电梯到达有呼叫信号的楼层平层区时,产生平层减速信号,驱动V0(PLC地址为AQW0)连接的变频器,进入低速运行状态,接着到达指定楼层,电梯停车。
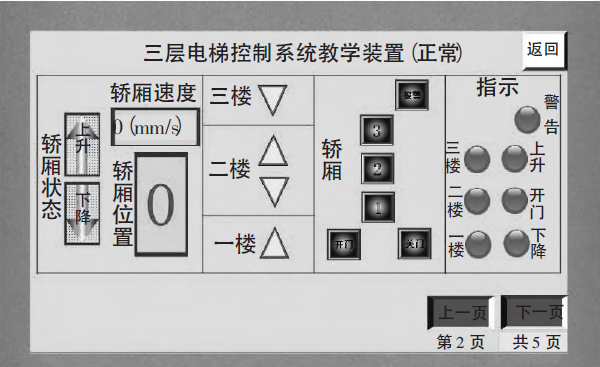
图6 电梯正常模式触摸屏界面
3.6人机界面设计
为了增加此电梯教学装置的控制功能,以及让学生练习人机界面的软件开发过程,于是,在此装置控制系统里采用了触摸屏对电梯进行控制。该触摸屏型号为SK-070AE,采用232通讯方式与CPU226进行通讯连接,其编程软件为SKWorkshop,电梯正常模式下的触摸屏界面如图6所示。
4 结语
本文介绍了一种自主研发的三层电梯教学装置,详细说明了机械系统开关门机构的设计和曳引电机的选取及其参数的计算,并对其控制系统作了详细分析与介绍。此装置不但可以辅助一些教学机构完成相关专业的教学,还可以为学生提供良好的实验学习环境,让学生在实践中锻炼自己,实现理论与实际的良好结合。目前,此装置已被我校机械工程学院用于实践性教学当中,深受学生欢迎,并实现了很好的教学目标。最后,希望此电梯教学装置的研发能为高校相关专业的教学或相关领域的研究提供一定的参考价值。


