基于S120变频器的电梯控制系统设计
电梯属于特种设备,其设计、制造和安装要满足国标GB7588-2003和GB/T10058-1997的要求。变频器是驱动电梯曳引电机的核心电气设备,直接影响着电梯运行的安全性和稳定性。对电梯的安全可靠的运行是非常重要的。许多公司针对电梯的特殊要求,推出了电梯专用变频器来满足电梯的特殊要求。常见的有富士,MM440变频器等。而近年来,西门子公司推出的S120多功能变频器是一种高性能、高精度的变频器。集V/F控制、矢量控制、伺服控制等一体化,采用模块化的设计的多轴驱动系统。该系统由控制单元、整流单元、传感器单元和编码器等通过驱动接口连接形成一个大的控制系统。因此在现行电梯控制系统的基础上,设计一款基于S120变频器控制系统有重要意义。
1、系统的构成
电梯的控制系统主要有逻辑控制和变频调速系统构成。电梯控制系统结构如图1所示,逻辑控制采集现场信号,电机速度型号等,并且输出显示信号和报警信号等,另外也能实现电梯内部及后台之间的通信连接。变频调速系统接收主板的启停和速度命令信号驱动曳引电机的运行,并通过电机末端的编码器把电机的转速信号反馈主控制板,形成闭环控制,主板根据反馈的信号调整变频器的转速。从而保障保障变频器驱动电机拖动电梯轿厢稳定、安全运行。

图1电梯控制系统结构
2、基于S120变频器的电气系统设计
2.1系统结构
S120变频器的电气系统主要控制元件包括主控制器、S120变频器、编码器及各种传感器。主控制器使用HCR5600,其内部集成双32位单片机,支持CAN、RS485和RS232通信,能够和变频通信,并支持而群控、并联、有线或者无线监控等功能。主控制器响应楼层的呼叫信号、轿厢信号和开关门信号等,向变频器发送控制命令启动系统运行。并通过反馈编码器实现稳定控制。SIEMENSS120变频器给电机提供频率可调的交流电源,实现电梯的高速、中速和低速运行,达到节能和稳定控制。变频调速系统结构如图2所示,主要有功率单元PM340、控制单元CU320和SMC20三个单元组成。功率单元完成频率和电压的变换,控制单元在速度控制模式下最多能控制4个矢量轴或6个伺服轴,可以轻松的完成电梯的控制任务,编码器模块单元完成系统的闭环控制。
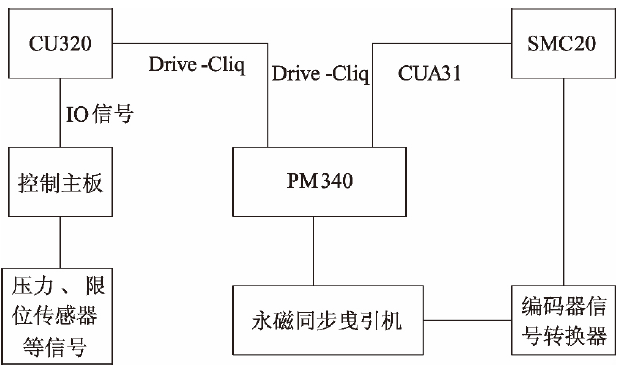
图2变频调速系统结构
2.2主电路设计
系统主电路如图3所示,三相电源经过变频器启动接触器KM1和KMC与变频器接口模块相连,经整流单元后与逆变模块连接,输出端U2,V2,W2经接触器KMY1与曳引电机构成供电主回路。系统上电后,主控板给输出信号使得KM1、KMC闭合,变频器主回路接通。同时变频控制回路初始化,并把该结果经过PLA节点发送给主控制板。但是输出端接触器KMY1断开,只有电梯需用运行时才使得KMY1接通拖动电动机运行。
2.3系统模块功能
CU320是SINAMICSS120变频器的控制单元,主要用来控制和调节系统中所有功能模块,最终完成各轴的速度、电流及位置的精确控制。用一块CU320可以实现各轴之间的数据交互。即任意一轴都可以识别控制器中其他轴的数据,这项功能被广泛用于轴之间的简单同步。SMC20是编码器接口模块,最大接收频率500KHZ,同时是信号转成DRIVE-CLiQ接口信号。而电源模块主要有三种:基本型、主动型和智能型,该系统选择主动型电源模块,具备整流反馈单元,且直流母线电压可以调整。
2.4控制回路设计
在曳引机的驱动轴上安装有旋转编码器,永磁同步电机的编码器为海德汉ERN1387增量式编码器。编码器器信号分成两路,一路反馈至变频器信号输入端构成闭环控制;另外一路反馈至主板,使主控制板根据偏差量控制电梯的平稳运行。
多段速控制原理如图4所示,变频器以多段速方式运行。主控制板依据电梯内选或者外呼叫信号,计算出目标楼层,此时闭合KMY1变频主回路接通,根据主控板发出的上行或者下行信号使能变频器的FWD或者REV端子,并且运行信号RDY有效后,打开抱闸。启动电机,并根据主板的信号选择多段速端子SS1、SS2、SS4的频率组合。变频器就按照设定的频率和运行曲线运行。

图3电气系统主回路原理图

图4多段速控制原理图
当需要停止时,主板APCR在预设的减速距离时把多段速度改为爬行速度给变频器的数字量端子,电梯就会按照变频器设定的速度曲线运行至爬行速度。当快到平层时多段速信号关闭,然后激活下闸信号,最后停掉方向信号,完成一个流程。
2.5S120变频器参数设置
确认S120驱动系统各部分已通过通讯线缆正确连接,并且CF卡正确插入S120驱动系统中CPU模块内。至此,驱动控制系统硬件连接已就位。确保控制柜内其它电气线路准确无误后,上电。待S120驱动系统各模块就位,状态指示灯RDY为绿色,此时,硬件就位。使用标准网线分别接入CPU模块以太网口与电脑RJ45以太网口,完成调试设备与S120硬件通讯硬件连接。设置前电机的抱闸开放,参数设置主要包括电机参数整定、角度学习与空载动态优化三个部分。
(1)电机参数整定
打开Vector_02参数组,修改参数P340=1,把电动机的功率、电压等铭牌参数写入变频器,设置完成P340恢复为0;然后更改参数P1910=1,进入CU320数据组,打开输入输出参数表,把参数X122中DI1改成Simulation方式并激活,使能整流模块,同时开始电机参数整定,结束时把P1910恢复成0,并撤除DI1的激活状态。
(2)角度学习
修改专家参数组中P1990=1,进入CU320参数组中的输入输出参数表,把X122中DI1设为Simulation控制方式并激活,使能整流模块,此时角度学习开始,电机缓慢转动,学习结束后P1990自动恢复为0,手动撤除DI1激活状态;学习完成后,查看参数P431角度学习值。之后,重复学习3次角度值观察P431数值变化,如基本保持不变则将此角度值保存写入变频器。
(3)空载动态优化
设置Vector_02参数组中,专家参数列表中的P1960=1,之后CU320参数组中的Iuputs/outputs子参数表,将X122中DI1设为Simulation控制方式并激活,使能整流模块,此时动态优化开始,电机高速转动,学习结束后P1960自动恢复为0,手动撤除DI1激活状态。试运行。
完成上述3项参数设置后,短接控制柜内输出端子进行各段速下空载运行,观察各段速下曳引机转动是否正常,平稳,有无异响。
3、系统控制流程
主控制器使用HCR。系统工作过程如图5所示,上电程序初始化,接到呼叫电梯信号后电梯运行,中途如果有顺向信号则响应信号。达到目标楼层时,电机减速平开关门。如果没有呼叫信号,则流程结束。如果有呼叫信号,则返回重新运行。系统顺向信号优先,逆向楼层信号暂存。等顺向呼叫信号执行完毕后,执行逆向信号。

图5系统工作流程
4、结束语
通过对S120电梯变频调速系统进行分析和设计,对变频调速各模块之间的拓扑结构进行优化。并对变频调试的主电路和控制回路进行设计。经过对S120设定的参数进行多年测试,运行稳定可靠,直接由变频器引发电梯故障几乎为零。S120变频器强大的功能,能够保障使电梯运行稳定、故障少,具有广阔的应用空间。


