PLC控制工业送料机构设计分析
现代机械制造企业要提高产品生产的自动化程度和生产效率,首先必须从自动化送料机构开始,因此工业送料机构在工业自动化生产中起着十分重要的作用。近年来,由于PLC在控制性能、硬件成本等方面所表现出的综合优势,其在工业自动控制领域的应用愈来愈广泛。本文应用PLC控制自动送料装置,主要研究内容包括总体方案设计、机械结构设计与建模、液压驱动系统设计、PLC 控制与编程等。
1、工业送料机构的总体方案设计及选取
1.1工业送料机构总体方案设计
对工业送料机构的基本要求是能快速、准确地拾取、搬运和释放物料,这就要求它具有精度高、反应速度快、承载能力强、工作空间范围大、自由度灵活及能自动定位在任意位置等特性。本研究设计的送料机构将物料从一个工位搬运到另一个工位,以此实现物料的灵活转换。
由于送料机构的位置功能主要是在两个工位之间进行工件(物料)的搬运,所以对整个送料机构的自由度要求不是很高,2~3个自由度即可满足要求。
根据物料是在两个工位之间运送的相关要求,在对大量的文献进行了分析与总结后拟定出以下3种工业送料方案。
1)方案1
原理如图1所示。方案1的工件送料机构有2个自由度,也就是图1中沿A气缸方向和沿B气缸方向,工件只能在这两个方向运动。基本工作原理: 用A、B两个气缸将工件从料仓中传递到滑槽。按下按钮,气缸A伸出,将工件从料仓推出,推到目标位置后气缸B将其推入输送滑槽; 工件传递到位后,A缸回缩,接着B缸回缩,工件机落入接料槽; 依此循环往复,完成周而复始的送料。
2)方案2
原理如图2所示。方案2的送料机构有2个自由度,即沿水平移动气缸方向和沿垂直移动气缸方向。基本工作原理: 首先取物装置(负压吸盘)抓取物料,燃火水平气缸和竖直气缸运动,到达相应的位置后取物装置放下物料,再回到物料搬运的起点,这样循环往复,实现两个工位间的物料搬运。
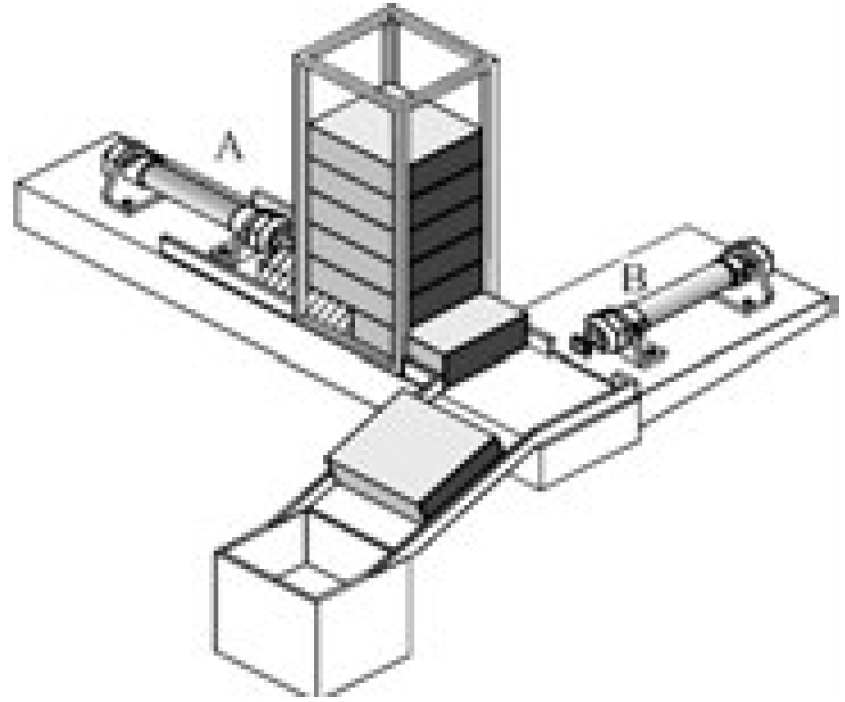
图1方案1原理
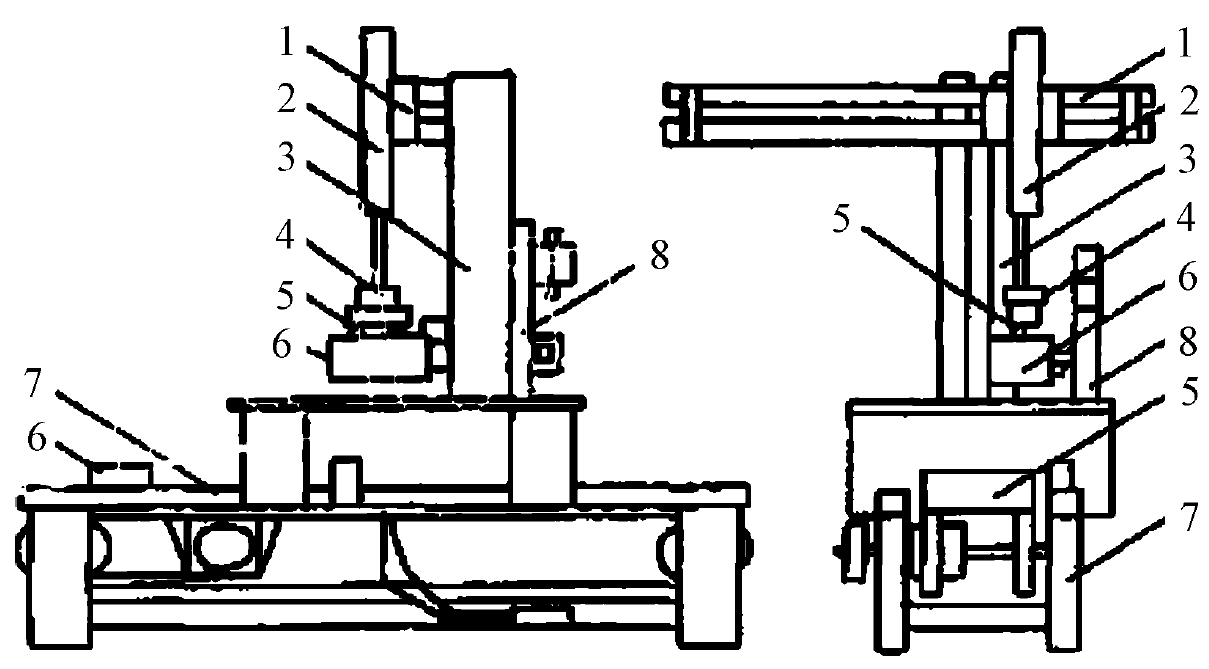
1.水平移动气缸; 2.垂直移动气缸; 3.立柱; 4.摆动气缸;5.负压吸盘; 6.工件; 7.直线单元; 8.气动阀门组
图2 方案2 原理
3)方案3
原理如图3所示。方案3的机械结构实现两个工位间的移料动作,手臂具有回转、升降及伸缩运动。该送料机构具有3个自由度,即回转自由度θ(正转和反转) 、升降自由度x(上升和下降)和伸缩自由度r(伸出和缩回) 。被抓取工件是水平抓取,然后水平放置,搬运过程中无需改变工件的姿势,因此可以省略手腕模块(只设计夹紧和放开,而不设计抓取手腕的回转)。根据工件外形(圆形物料),夹持部分采用两指手爪,具有一个开合运动(夹紧和放松)。
1.2工业送料机构方案评价及选取
方案1 的优点: 只有A和B两个气缸,结构简单,物料只有2个自由度,操作和控制方便,基本能实现两个工位间物料运输。
方案1 的缺点: 整个送料机构的自由度数为2,所以灵活性低,只能在1个平面内送料,且没有物料抓取装置,所以实用性、通用性不高。
方案2 的优点: 有2个气缸和1个抓取装置,结构简单,能实现抓取物料、水平和竖直移动这3个动作,操作和控制也比较方便,可以实现两个工位间物料的运送问题。
方案2 的缺点: 与方案1类似,只有2个自由度,所以整个机构的灵活性不高,而且只能在1个平面内送料,尽管有取物装置,但其通用性不高。
方案3 的优点: 较前两个方案该机构自由度为3,所以灵活性比前两个方案要高; 另外该方案能实现空间任意位置物料的运送,其通用性、实用性也比较好; 有机械抓取装置,对物料外形要求较低。
方案3 的缺点: 机械结构较复杂,操作和控制也较繁琐。
在充分考虑整个送料机构的灵活性和实用性的基础上,选取方案3作为设计的送料机构方案,并对其结构进行建模。
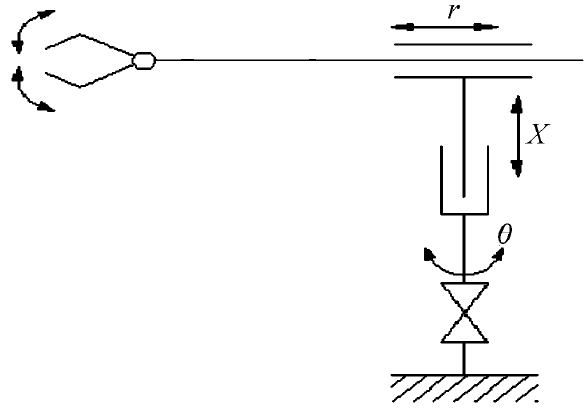
图3 方案3原理
2、工业送料机构建模
工业送料机构(本文指机械手)结构可分为基座、立柱、手臂、手腕、手部等模块。各个模块根据功能需要又可进一步划分。机械手的各组成部分如图4所示。
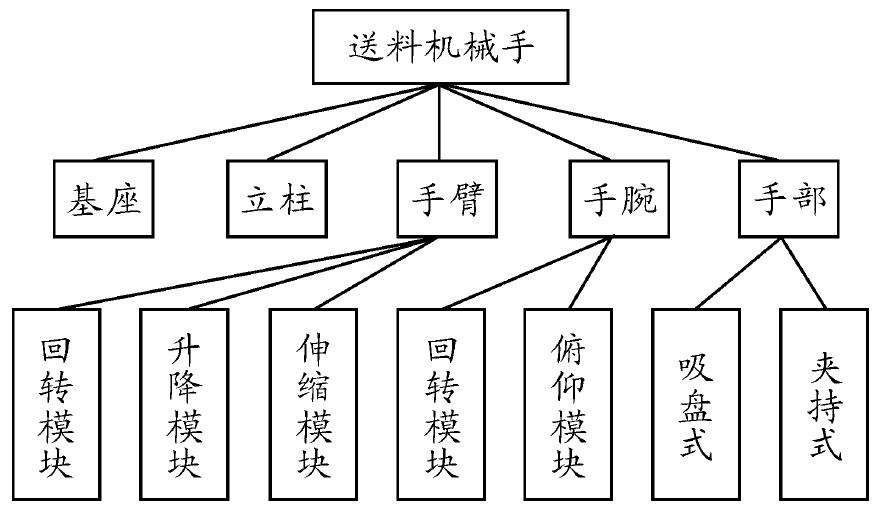
图4 机械手的各组成部分
2.1工业送料机构的手部设计
各组成部分需要完成特定的功能。首先设计手部模块。由于本文所运送的物料为圆形棒料,因此选用连杆杠杆式,具体建模过程如图5、6所示。建立各个连杆三维模型后,得到手部装配情况,如图7 所示。
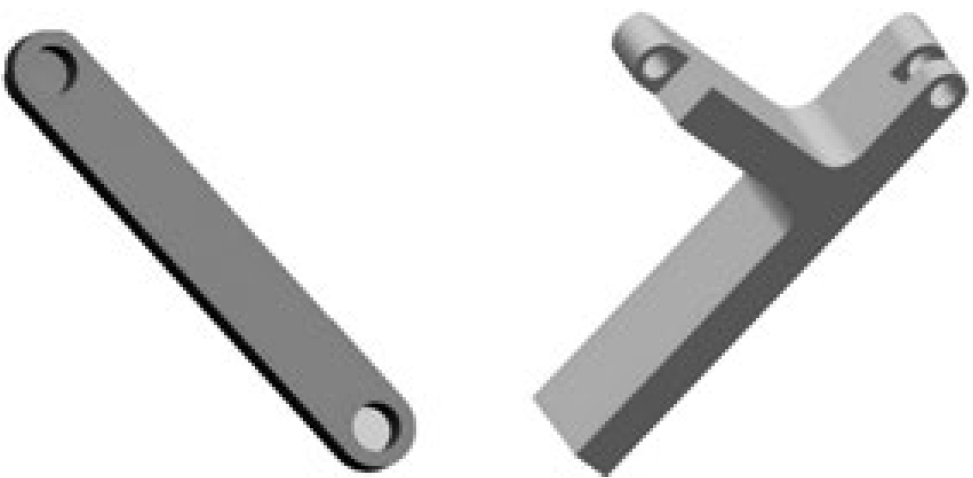
图5手部连杆1三维模型 图6手部连杆2三维模型
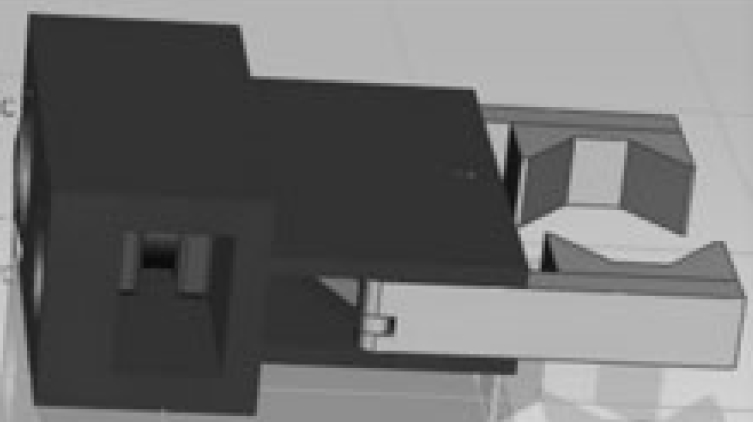
图7手部装配情况
2.2工业送料机构的手臂部分设计
手臂是支撑手部和工件并使它们运动的机构。手臂一般有3个方向的运动: 伸缩、旋转和升降,其中旋转、升降运动是由横臂和立柱完成。
1)送料机构横臂设计
作直线运动横臂的结构基本上是由驱动液压缸和导杆组成,液压缸采用双作用单活塞杆实现横臂往复运动,结构上采用液压缸体固定在横臂支撑上,活塞杆运动,横臂最大行程为200mm。
根据上述要求设计出一种横臂支撑装置,如图8所示。
送料机构在进行伸缩运动时,为防止手臂沿伸缩方向轴线转动,以及加大承载能力、提高运动精度,必须设有导向装置。本送料机构将液压缸缸体固定在横臂支撑上,导杆穿过旁边小孔,这样可以有效避免旋转,提高承载能力和运动精度。根据上述要求建立三维模型,再将其进行装配,如图9所示。
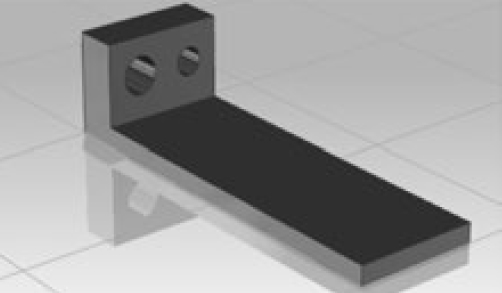
图8 横臂支撑装置
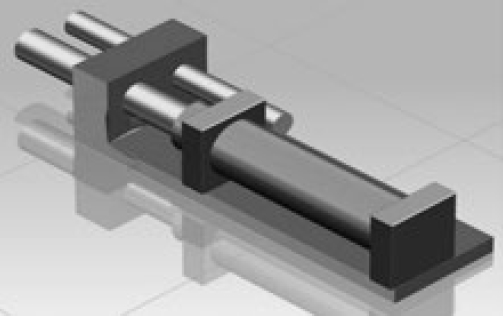
图9 横臂装配图
2)送料机构竖直臂设计
竖直臂与横臂类似,由驱动机构、导向机构组成。驱动机构为液压缸驱动,导向机构为单导杆导向,其最大行程为100mm。最后将导杆和套筒进行装配,如图10所示。
2.3送料机构回转机构及底座设计
实现送料机构手臂回转的运动形式有多种。
本送料机构中的回转机构采用齿轮齿条结构,即通过齿条往复移动带动与手臂联接的齿轮往复运动,实现手臂的回转运动。装配图如图11所示。
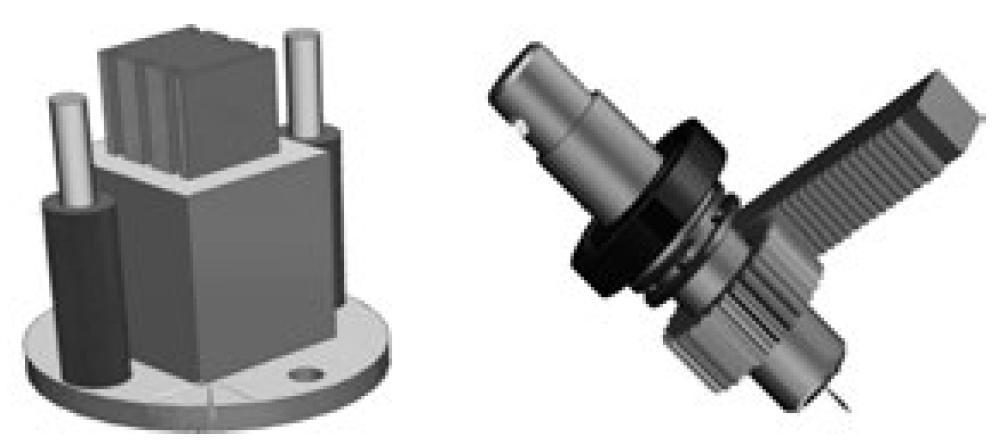
图10竖直臂装配图 图11轴及其轴上零件装配图
底座是送料机构的基础部分,是支撑起送料机构的构件。送料机构底座安装一根轴、向心球轴承和推力球轴承,底部还要留有一定空间用于安装齿条。结合以上要求设计出的送料机构底座
如图12 所示。
2. 4 送料机构三维装配图
利用虚拟装配技术得到送料机构的装配图,如图13 所示。
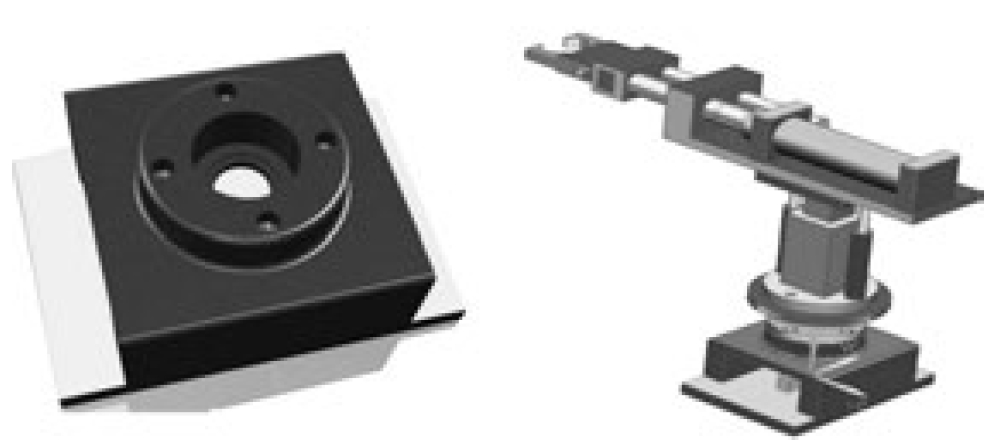
图12 送料机构底座零件图 图13 送料机构的装配图
3、液压驱动原理图设计
本次设计的送料机构要完成移料动作,因此需要对液压缸的位置进行精确控制。每一个送料机构里的自由度对应的液压缸在送料过程中仅有两个位置供停止。由于实际应用情况的变化,液压缸活塞往往需要停留在中间位置。基于此,本文中送料机构的回转液压缸采用锁紧回路,可使液压缸活塞在任意位置停止,并防止其停止后窜动。另外,为了防止立式液压缸和垂直运动的工作部件由于自身重力而超速下降,或在下行运动中由于自重而导致发生失控、失速等不稳定运动,液压系统中必须设置平衡回路。基于以上分析,设计的液压系统原理如图14 所示。
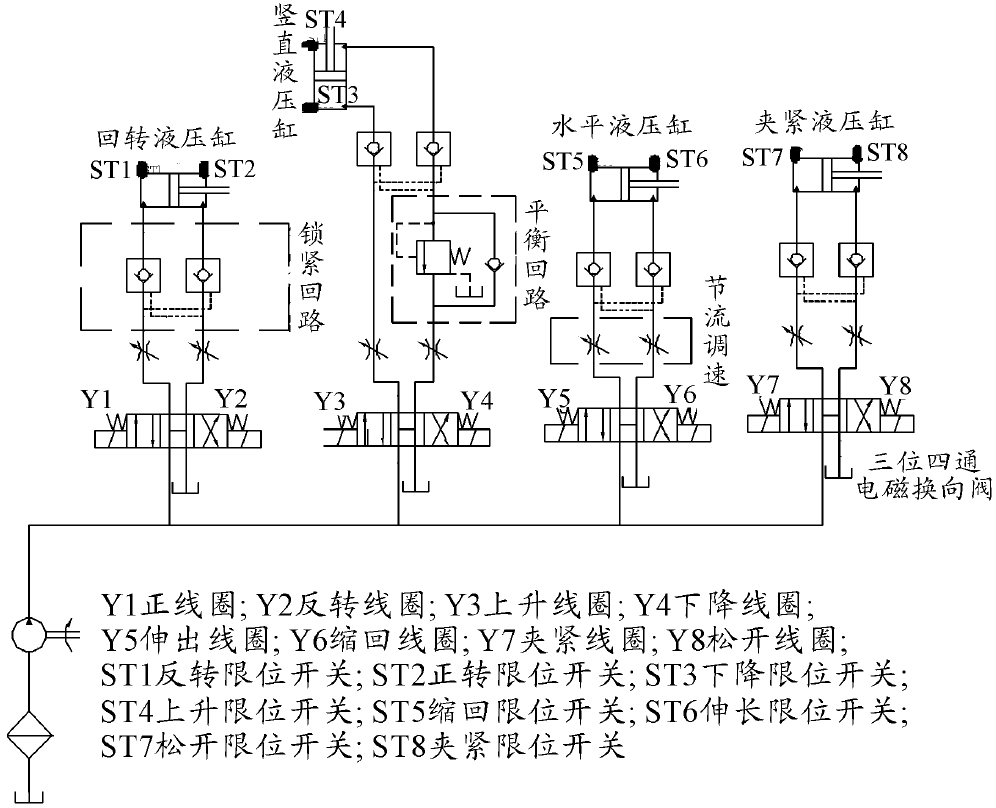
图14 液压系统原理
4、工业送料机构PLC 控制程序设计
送料机构的循环动作为: 下降→夹紧→上升→正转→伸出→放松→缩回→反转→下一循环。按照此循环动作,设计了输入和输出之间的分配关系,如表1 所示。
表1 输入和输出之间的分配关系
|
现场器件 |
内部继电器地址 |
说明 |
|
输入 |
SB1 |
400(X000) |
启动按钮 |
|
ST1 |
401(X001) |
反转限位开关 |
|
ST2 |
402(X002) |
正转限位开关 |
|
ST3 |
403(X003) |
下降限位开关 |
|
ST4 |
404(X004) |
上升限位开关 |
|
ST5 |
405(X005) |
缩回限位开关 |
|
ST6 |
406(X006) |
伸长限位开关 |
|
ST7 |
407(X007) |
松开限位开关 |
|
ST8 |
410(X010) |
夹紧限位开关 |
|
SB2 |
411(X011) |
复位按钮 |
|
输出 |
Y1 |
431(Y001) |
正转线圈 |
|
Y2 |
432(Y002) |
反转线圈 |
|
Y3 |
433(Y003) |
上升线圈 |
|
Y4 |
434(Y004) |
下降线圈 |
|
Y5 |
435(Y005) |
伸长线圈 |
|
Y6 |
436(Y006) |
缩回线圈 |
|
Y7 |
437(Y007) |
夹紧线圈 |
|
Y8 |
440(Y010) |
松开线圈 |
|
HL |
430(Y000) |
原位指示灯 |
根据实现控制功能的要求,编制控制程序梯形图,如图15所示(截取部分)。对编制的程序进行了相应的逻辑调试及验证,结果表明,所编制的程序是正确和有效的。
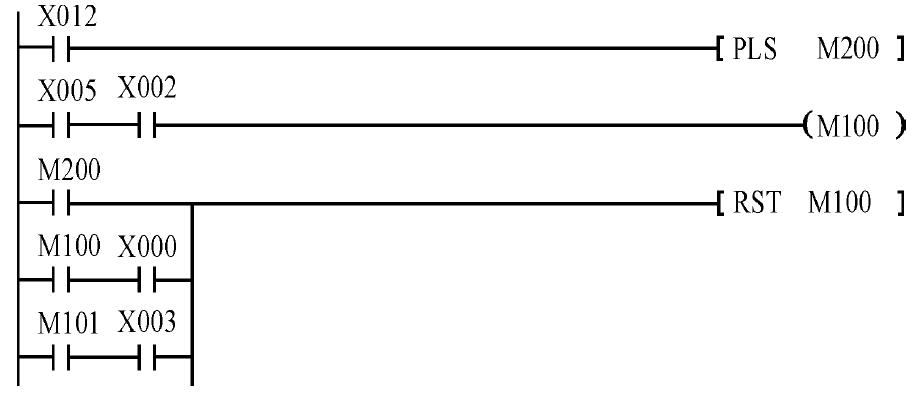
图15 程序梯形图(部分)
本文根据要完成移料动作的功能要求,对自动送料装置进行了研究,主要内容包括总体方案设计、机械结构设计与建模、液压驱动系统设计、PLC控制与编程等。对编制的程序进行了相应的逻辑调试及验证。PLC具有使用灵活、操作可靠、工艺参数修改方便等特点,采用后可以大大提高设备的自动化水平和经济效益。


